ساخت ربات صخرهنورد با پنجههای جدید
جمعه, ۲۳ مهر ۱۳۹۵، ۱۰:۳۳ ب.ظ

محققان دانشگاه استنفورد موفق به ساخت پنجه چسبندهای شدند که به کمک برجستگیهای میخ مانند، بالا رفتن از هر نوع صخرهای را برای ربات ممکن میکند.
به نقل از ساینس نیوز،
بیش از یک دهه قبل مطالعات متخصصان رباتیک دانشگاه استنفورد بر روی تولید
بازوهای رباتیک با میخهای بسیار کوچک برای قرار گرفتن بر روی سطوح محکم و
صاف آغاز شد. اکنون فناوری پنجههای به اصطلاح چسبناک به مرحله شکوفایی
رسیده و ربات را قادر میکند تا از صخرههای صاف بالا برود.
موفقیت متخصصان رباتیک دانشگاه استنفورد
تا حدی قابل توجه است که توجه دانشمندان ناسا را متوجه این دستاورد کرده
است، بهطوریکه دانشمندان ناسا این فناوری را بهترین روش برای فرود ایمن و
محکم فضاپیما بر سطح دنبالهدارها و سیارکها میدانند.
فناوری پنجه چسبنده در کنفرانس بینالمللی
سیستمهای رباتیک باهوش در کره جنوبی توسط سرپرست تیم تحقیقاتی دانشگاه
استنفورد رونمایی شده است.
پنجههای رباتیک جدید تا چهار برابر قدرت
چسبندگی بیشتری نسبت به نسل قبلی دارند و ربات صخرهنورد را قادر میکند تا
نه تنها از صخرههای کاملا عمودی بالا رود، بلکه حتی به حالت وارونه از
نزدیکی طاق نیز عبور کند.
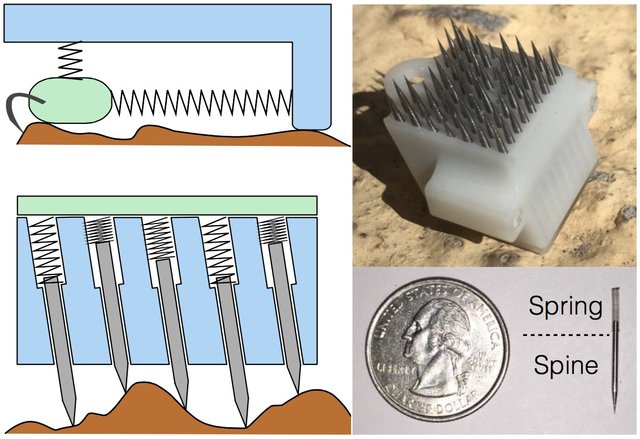
مهمترین ویژگی پنجه چسبنده محققان
استنفورد، افزایش بسیار بالای میخهای کوچک با قابلیت انعطافپذیری منفرد
است، بهطوریکه در شرایطی که صخره دارای مقداری برآمدگی در سطح باشد، هر
میخ به صورت انفرادی با سطح برجسته هماهنگ شده و به اصطلاح چسبندگی کافی
برای تحمل وزن ربات را ایجاد میکند.
تراکم میخهای موجود در پنجه رباتیک حداقل 60 میخ در فضای 18 میلیمتر مربع است.
